|
|
|
|
In prezent sistemele de productie sunt tot mai complexe, cerintele de productivitate siguranta si calitate sunt tot mai exigente.
Este de neconceput astazi un sistem sau un proces care sa nu fie
automatizat sau cel putin monitorizat utilizind siteme moderne de achizitie si prelucrare avertizare si afisare. Desigur calclatoarele
sunt elementele cheie in procesul de automatizare si monitorizare.
In multe locuri calculatoarele pot fi folosite cu succes in toate fazele : achizitie prelucrare comanda
averizare monitorizare etc. In acest caz conducerea si monitorizarea unui proces devine centralizata, toate atributiile revenind calculatorului.
Pentru procese relativ simple cu numar mic de paramerii de achizitionat precum si cu un numar redus de comenzi relativ simple, metoda centralizata este potrivita. Odata cu cresterea numarului de parametrii care trebuiesc monitorizati, se produce suprasolicitarea calculatorului.
Conducerea proceselor in sistem centralizat prin intermediul calculatorului prezinta desigur avantaje certe, insa un astfel de sistem este extrem de vulnerabil.
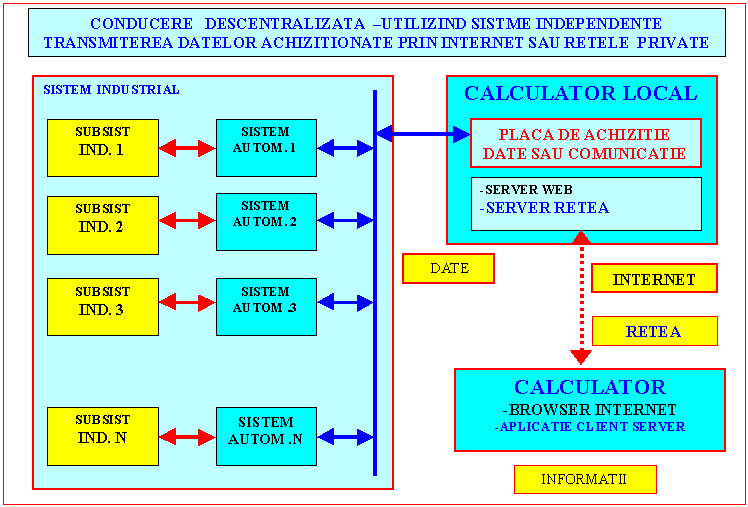
O simpla defectiune a calculatorului central paralizeaza intreagul sistem. Pentru a preveni astfel de incidente s-au conceput sisteme descentralizate de comanda si control automat in care sarcinile sun distribuite mai multor sisteme independente care comunica cu calculatorul central.
Avind in vedere complexitatea sistemelor actuale si necesitatea asigurarii unei fiabilitati deosebite sistemele descentralizate par a fi astazi cea mai viabila solutie.
Nu numai fiabilitatea sporita impune sistemele descentralizate ci si numarul mare de semnale care trebuiesc achizitionate si prelucrate la viteze tot mai mari precum si numarul mare de comenzi tot mai sofisticate si mai precise.
Descentralizarea consta in introducerea unui anumit numara de sisteme de achizitie si control DCS (Distributed Control System) care pot functiona independent pentru a rezolva probleme specifice in diferite puncte ale sistemului de automatizat. Ficare astfel de sistem indeplineste functiile particulare pentru care a fost desemnat avind si posibilitati de decizie locala fara a mai interoga calculatorul central, insa comunica cu acesta fie la cererea calculatorului fie din proprie initiativa in functie de tipul de protocol stabilit la proiectarea intregului sistem.
Eventuale disfunctionalitati ale calculatorului central sau a altor sisteme nu implica caderea intregului sistem ci numai partial. De multe ori mentinerea in stare de functionare macar a unor parti din sistem este vitala.
Descentralizarea permite reducerea complexitatii programelor de aplicatii care ruleaza pe calculatorul central si transferarea complexitatii pe mai multesisteme.
Posibilitatea aparitiei erorilor de programare creste exponential cu dimensiunea programelor. In sistemele distribuite si programele sunt distribuite in sensul ca o data cu degrevarea calculatorului central acesta trebuie sa ruleze programe mai putin complexe restul de complexitate regasindu-se pe celelalte sisteme.
Proiectarea si intretinerea aplicatiilor devine deci mai simpla si mai putin costisitoare. Avind in vedere aceasta distribuire a complexitatii inseamna ca aplicatiile pot fi realizate de echipe de proiectanti si programatori deci o scurtare a timpului de proiectare, implementare si desigur o crestere a performantei pe ansamblu comparativ cu aplicatiile centralizate care sunt greu de realizat in echipa.
Sistemele distribuite pot fi realizate la randul lor din calculatoare sau pot fi realizate din sisteme specifice care utilizeaza automate programabile, microprocesoare, controlere, traductori inteligenti.
Atunci cand procsele industriale nu necesita automatizare complexa respectiv cand nu e nevoie sa monitorizam marimi analogice ci numai citeva valori digitale si sa furnizam numai comenzi digitale cele mai potrivite dispozitive pentru a realiza comanda si monitorizarea sistemelor industriale sunt automatele programabile.
Chiar daca sistemul industrial nu este complex pentru a realiza un sistem de comanda si monitorizare cit mai fiabil se folosesc mai multe automate programabile fiecare automat ocupandu-se de anumite parti ale sistemului industrial. Toate automatele comunica printr-o consola cu sistemul central realizindu-se astfel conducerea unitara a intregului proces industrial. Avantajul major fiind acela ca daca sistemul central sau o parte din automate se defecteaza celelalte automate pot functiona in continuare asigurand functionarea celorlalte parti neafectate astfel se evita caderea intregului sistem in caz de incidente.
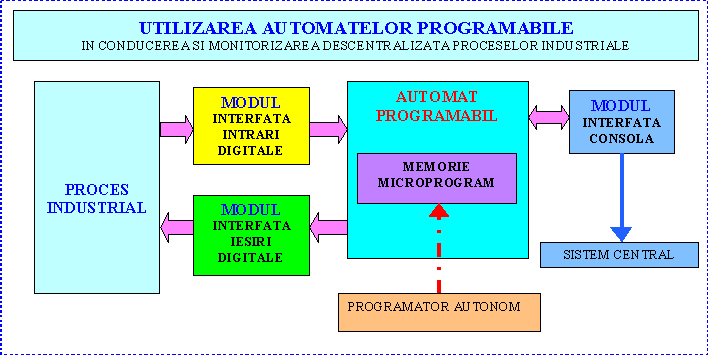
Un automat programabil se connecteaza la procesul industrial prin intermediul modulelor de interfata de intrare si de iesire. Conectarea la sistemul centralizat de comanda se face prin intermediul modulului de interfata cu consola. In figura de mai jos este schitat la nivel de schema bloc modul de conectare a unui automat programabil la sistemul industrial si dispozitivul central.
Automate programabile
Automatele programabile sunt sisteme dinamice a caror comportare in timp se poate descrie ca o succesiune de evenimente(stari) ce apar la momente discrete in timp. Schema bloc de implementare a unui automat secvential programabil se poate reprezenta astfel:
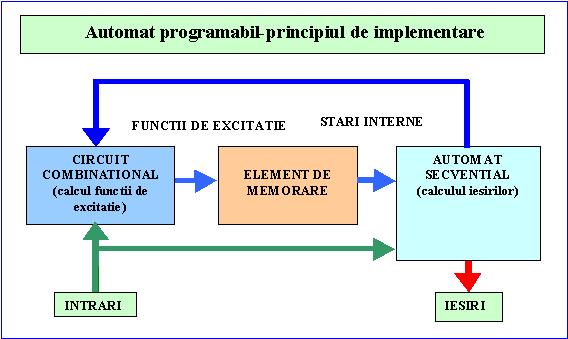
Elementul principal al automatului este reprezentat de automatul secvential care pe baza intrarilor si al elementelor memorate formleaza niste iesiri pentru momentul curent t si deasemenea furnizeaza elementele necesare calcului functiilor de excitatie pentru momentul t+1. Functiile de excitatie necesare pentru a selecta alte elemente pentru momentul t+1 sunt calculate de circuitul combinational de la intrare din noile date de intrare si elementele furnizate de automatul secvential in momentul t.
Prin memorarea in prealabil in elementul de memorare a tuturor elementelor care permit calculul iesirilor curente si a noii stari din momentul urmator putem descrie comportarea acestui sistem dinamic. Schema de sus impelmenteaza deci ideea de automat programabil.
Acest automat realizat din componente electronice va arata ca in figura de mai jos:
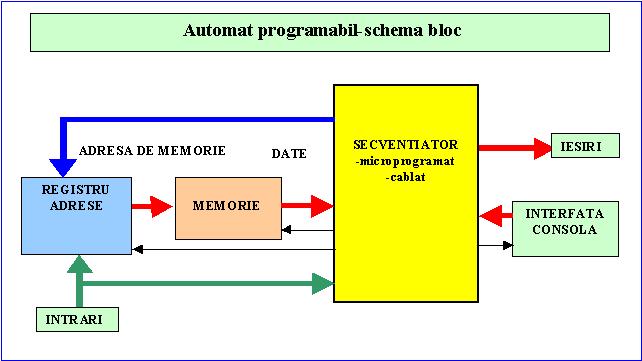
Secventiatorul este un circuit capabil sa furnizeze semnalele de iesire functie de semnalele de intrare si de datele furnizate de memorie la momentul t.
Ca un element de noutate secventiatorul tine cont si de intrarile de la intervata consola. Prin interfata consola automatul poate fi conectat cu alte automate sau cu sistemul central de monitorizare si prelucrare. Acest automat deci se poate integra intr-un sistem descentralizat de monitorizare si conducere.
Secventiatorul furnizeaza si adresa urmatoare pentru momentul t+1. Aceasta adresa impreuna cu intrarile din momentul t+1 vor forma in registrul de adrese adresa absoluta pentru memorie in momentul t+1.
Secventiatorul are si rol de sincronizare pentru restul elementelor automatului
Pentru a descrie mai precis functionarea automatului respectiv a secventiatorului sa consideram schema bloc de mai jos:
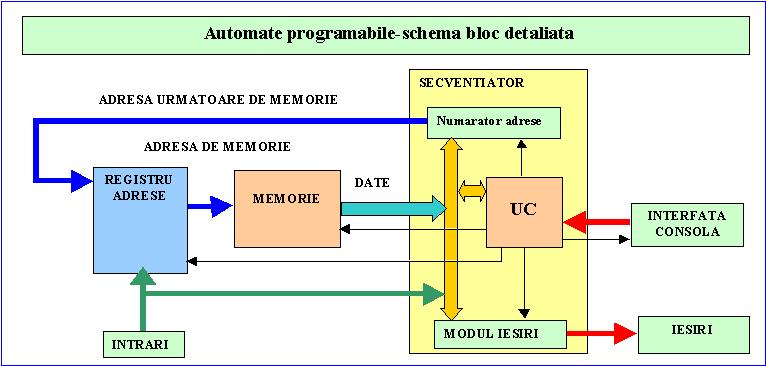
Segventiatorul este format dintr-un numarator de adrese o unitate centrala UC si un modul de iesiri amplasate in jurul unei magistrale interne comuna. UC este unitatea de comanda care practic controleaza functionarea si sincronizarea intregului automat. UC-ul este realizat printr-o logica cablata sau printr-logica microprogramata.
UC-ul ar putea fi deci un nou automat programabil. Se pune problema ca noul automat programabil ar nevoie din nou de un automat programabil si tot asa la infinit.
UC-ul are complexitate mult mai redusa decit auomatul programabil. La fel si noul UC al UC-ului are complexitate mult mai rdusa decit UC-ul parinte deci cu siguranta dupa al doilea nivel el devine suficient de simplu pentru a fi realizat cablat.
La momentul t UC-ul activeaza anumite iesiri prin intermediul modulului de iesiri si trimite noua adresa spre memorie pentru momentul t+1. In general noua adresa este vechea adresa incrementata, avind in vedere ca cea mai mare parte a secventelor de control sunt operatiuni secventiale si mai putin operatiuni de salt. Din acest motiv noua adresa este formata de un numarator prin activarea unui semnal de incrementare furnizat de UC. In cazul in care noua adresa este o adresa de salt aceasta este luata de pe magistrala si numaratorul este fortat sa incarce noua valoare.
Din noua adresa furnizata de UC impreuna cu anumite date de intrare se formeaza adresa de memorie pentru momentul t+1. Comanda de incarcare este furnizata de UC pri linii de comanda speciale.
Pentru a programa automatul este nevoie de analiza sistemului de automatizat pas cu pas in functie de datele de intrare si starea anterioara. Memoria va fi iscrisa cu o succesiune de date care functie de intrarile din momentul t vor furniza informatii despre iesirile care trebuiesc activate si noua adresa la care se vor gasi urmatoarele informatii. Automatul dispune si de o interfata cu consola de la care se pot da comenzi locale sau prin intermediul careia se poate comunica cu alte sisteme sau cu calculatorul central. Automatul programabil este potrivit pentru automatizari cu un grad redus de complexitate si in special pentru automatizari in care nu intervin marimi analogice. In cazul cand procesul industrial care necesita automatizare si monitorizare necesita automatizari mai complexe in care intervin marimi analogice se folosesc dispozitive mai complexe cum ar fi procesoarele sau controlerele.
Pentru situatii in care numarul de paramerii este foarte mare si avem de-a face cu marimi analogice de intare sau iesire, algoritmi complicati pentru descrierea procesului industrial utilizarea automatelor programabile devine imposibila.
O schema bloc minimala de comanda si monitorizare realizata cu microprocesoare trebuie sa contina cel putin modulele de mai jos.
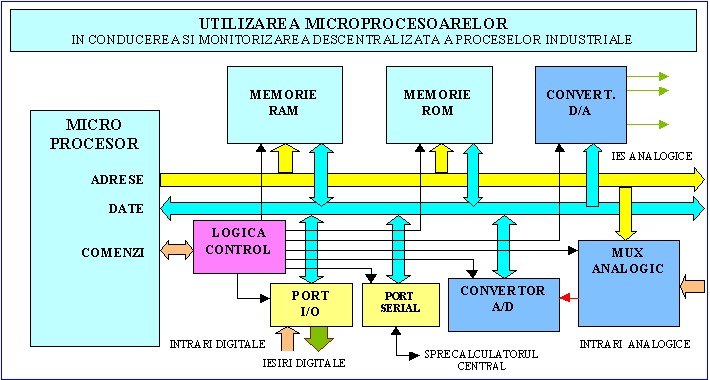
Programele aplicatie sunt stocate in memoria ROM fiind inscrise in prealabil cu ajutorul programatoarelor. Pentru a putea rula programele din ROM microprocesorul trebuie sa dispuna de memoria RAM, memorie in care este pastrata stiva program, o serie de operanzi, valori intermediare ,valorile variabulelor folosite in program precum si valorile curente ale marimilor achizitonate din procesul industrial.
Semnalele analogice din sistemul industrial sunt conectate prin intermediul unui multiplexor analogic la convertorul A/D.
Multiplexorul selecteaza un anumit semnal analogic (functie de adresa canalului stabilita pe magistrala de adrese) si il trimite convertorului A/D care il converteste intr-o valoare digitala care poate fi citita prin intermediul magistralei de date de catre multiplexor.
Semnalele digitale de intrare sau iesire sunt citite respectiv trimise prin intermediul portului I/O.
Comunicarea cu dispozitivul central de comanda se realizeaza de obicei prin intermediu portului serial.
In procese industriale in care sunt necesare comenzi de tip analogic sistemele de automatizare realizate cu microprocesoare dispun si de un numar de convertoare digital analogice care transforma valorile digitale transmise de procesor in semnale analogice necesare pentru a realiza comenzi analogice.
Toare modulele sunt coordonate de microprocesor prin magistrala de comenzi prin intermediul unui bloc de control care contine logica de control.
Microprocesorul executa programul inscris in ROM, program care ghideaza microprocesorul pas cu pas astfel incat pe ansambu sistemul rezolva automatizarea si monitorizarea specifica unui anumit proces sau subproces industrial.
Microprocesoare
Microprocesoarele sunt circuite secventiale cu un set propriu de instructiuni, definite de producator. Microprocesoarele lucreaza cu o memorie externa in care se pun instructiunile si datele specifice unei aplicatii.Microprocesorul extrage si executa secvential instructiunile din memorie.
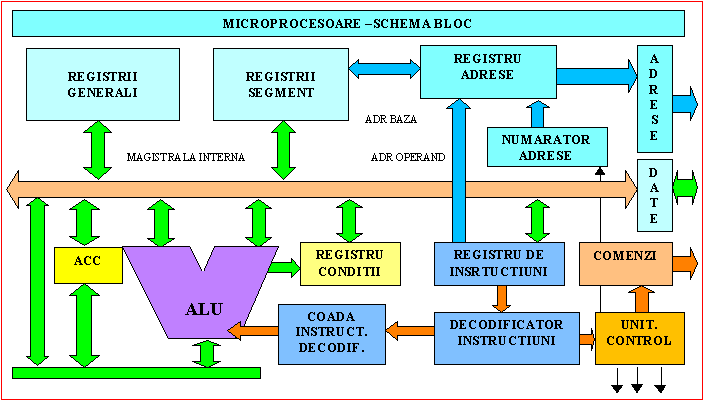
Dupa cum se observa in schema bloc de mai sus microprocesorul este realizat dintr-o serie de subansamble functionale dispuse pe o magistrala comuna.
Partea principala o constituie ALU –unitatea aritmetico logica care poate executa diferite operatii intre doi operanzi oferind rezultatul si o serie de indiicatori de conditii care sunt inscrisi in registrul de conditii. Operatia efectuata este dictata de instructiunea in curs, instructiune care este pastrata in registrul de instructiuni si este decodificata. In urma decodificarii instructiunii unitatea de control activeaza linii de comanda pentru toate subansamblele microprocesorului. ALU executa deci operatia selectata de unitatea de control in functie de instructiunea in curs. Pentru valori intermediare sau rezultate exista o serie de registre de uz general. Un registru specilal este ACUMULATORUL la care accesul este cel mai rapid si care este de multe ori accesat implicit in diferite operatii. Registrii segment tin adresa de baza pentru memorie in timp ce adresa relativa este data fie de un numarator de program fie de registrul de instructiuni in cazul cind instructiunea in curs contine adresa unui operand sau adresa de salt la o alta adresa. Din cele doua adresa este formata adresa absoluta pentru memoria externa adresa pastrata in registrul de adrese.
Pentru comanda si sincronizarea diferitelor sisteme din afara procesorului sunt trimise semnale de comanda furnizate de unitatea de control si adrese furnizate de registrul de adrese.
Schimbul de date cu perifericele se realizeaza pe magistrala de date.
Principlalu dezavantaj al sistemelor cu microprocesoare este faptul ca periferia din jurul procesorului este destul de complexa. Este nevoie atat de memorie externa (memorie ROM pentru pogram si memorie de lucru numita memorie RAM) cit si de diferite interfete pentru conectarea cu procesul industrial sau cu sistemele de comanda centralizate.
Controlere fac un pas inainte integrind o mare parte din periferie in interiorul lor.
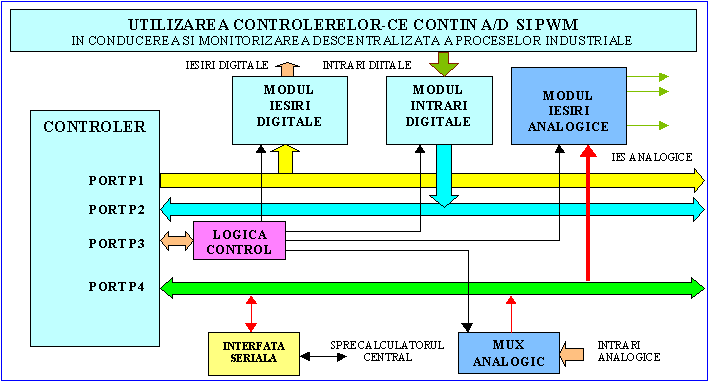
Utilizarea controlerelor in sisteme descentralizate de conducerea si monitorizare a proceselor industriale.
Nevoia de a obtine fiabilitate cat mai mare la costuri cat mai mici a dus la aparita controlerelor. Controlerele sunt circuite VLSI care includ pe langa procesorul propriuzis si memoria de lucru, memorie FLASH, memorie EEPROM, Timere interfete paralele seriale etc. Aplicatiile sunt mult mai usor de realizat, sistemele sunt mult mai simple deci mai ieftine si mai fiabile. Faptul ca memoria se afla in interiorul controlerului creste mult fiabilitatea si viteza de lucru a sistemului. Sistemele cu microprocesoare sunt mult mai pretentioase la zgomote avand magistrala de adrese si date in exterior in vederea conectorii memoriei externe. La sistemele cu controlere influenta zgomotelor este mult redusa din cauza simplicitatii sistemului pe ansamblu. Memoria fiind mai aproape de procesor posoibilitatea captarii unui zgomot este mai redusa deci situatiile in care programele se blocheaza sau ruleaza necontrolat sunt mult diminuate. In afara controlerului sunt dispuse mult mai putine circuite in general numai circuite de interfata sau multiplexare. In cazul in care controlerul nu dispune de convertoare A/D dau D/A schema bloc poate fi reprezentata la nivel de schema bloc ca in schita de mai jos.
Multiplexorul primeste o adresa de la logica de control si selecteaza una din intrarile analogice. Tot logica de control este cea care comanda convertorului sa inceapa conversia A/D a semnalului selectat de multiplexor. Valoarea rezultata este citita de controler pe unul din porturile existente, in cazul de fata portul P2.
Controlerul dispune de porturi seriale deci pentru conectarea cu dispozitvul central respectiv cu calculatorul central nu avem nevoie decit de o interfata seriala pentru adaptarea semnalelor la tipul specific de legatura seriala folosit la conectarea cu dispozitivul central.
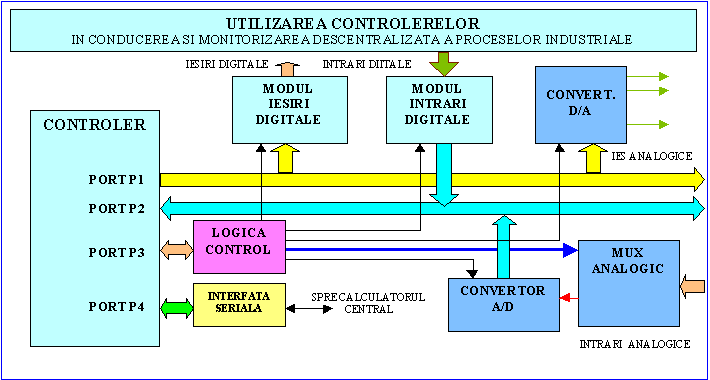
Rolul principal al sistemului il detine controlerul. Acest dispozitiv integreaza cea mai mare parte din periferia unui sistem cu microprocesor dind posibilitatea sa se realizeze sisteme mult mai simple si mai eficiente.
Se prezinta in continuare structura minimala a unui astfel de controler.
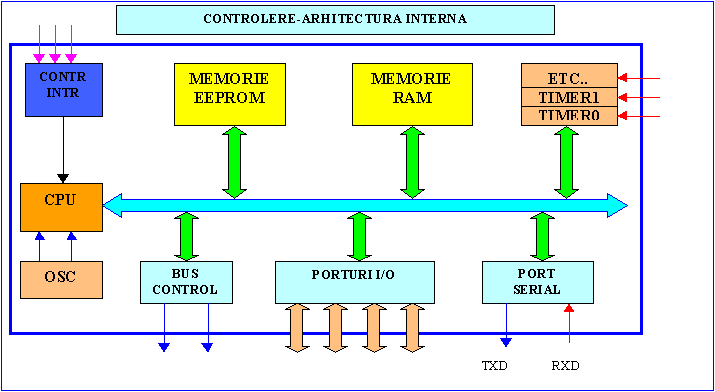
Porturile sunt bidirectionale, putind fi folosite atit ca intrare cit si ca iesire.
Controlerul dispune de mai multe intrari de intreruperi a caror nivele de prioritate poate fi programata. De foarte mare importanta sunt Timerele programabile car asigura atit frecventa programabila necesara portului serial cit si frecvente necesare la implementarea aplicatiei pentru realizarea Timerelor soft. Memoria ram exste folosita pentru stiva sau ca memorie de lucru. Memoria EEPROM se foloseste in general pentru a pastra programul aplicatie cit si pentru parametrii necesari diferitor programe aplicatie.
In prezent controlerele inglobeaza si convertoare A/D circuite PWM (Pulse Width Modulation) care pot fi folosite pentru a genera iesiri analogice suplinind deci convrtoarele D/A. Controlerele dispun de memorii tot mai mari de tip Flash care pot fi reinscrise de un numar foarte mare de ori deci aplicatiile pot fi tot timpul upgradate. Majoritatea dispun de facilitati In Circuit Programming astfel incit controlerele pot fi reinscrise cu noile programe fara a mai fi demontate, fiind reinscrise direct in sistemul in care se afla de unde si denumirea “Programare in circuit”
Dispunind de astfel de controlere sistemele realizate pe baza lor devin si mai simple.
Controlerul dispunind deja de convertoare A/D, PWM etc practic in afara controlerului nu mai montam decat module pentru conditionarea semnalelor si eventual multiplexoare pentru extinderea numarului de canale
Un astfel de controler conform schemei bloc de mai jos contine porturi complexe care pot fi programate sa devina:intrari digitale, iesiri digitale intrari analogice iesiri PWM, linii de comunicatie pentru porturi seriale, linii de intrerupere, linii de intrare pentru timere etc.
Se remarca complexitatea de Timere oferite pentru oscilator, reset, pornire,
Supraveghiere, frecventa de baud etc. Timerele de uz general foarte importante in dezvoltarea aplicatiilor in care e nevoie de a cronometra diferte intervale de timp. Dispunind de astfel de cronometre care pot primi intrarea de ceas din exterior sau din interior programatorul nu mai trebuie sa ocupe unitatea centrala cu rutine de temporizare focalizindu-se pe rezolvarae si implementarea algoritmului de functionare.
Este de remarcat si stiva cu 8 nivele care este de sine statatoare si nu ocupa loc din memoria de lucru, ramanand mai multa memorie de lucru disponibila.
Senzorii inteligenti sunt senzori de semnalnificat 4-20 mA care au in plus facilitati de transmisie a valorii semnalului masurat, in format digital. In general senzorii inteligenti utiklizeaza protocolul HART pentru transmisi valorii digitale.
In multe cazuri trebuie sa achizitionam date din sisteme speciale ce nu permit instalarea de sisteme de achizitie independente sau calculatoare. Traductoarele HART pot achizitiona date si pot face transmisia acestora atat sub forma analogica cat si digitala pe un singur canal (o singura linie)
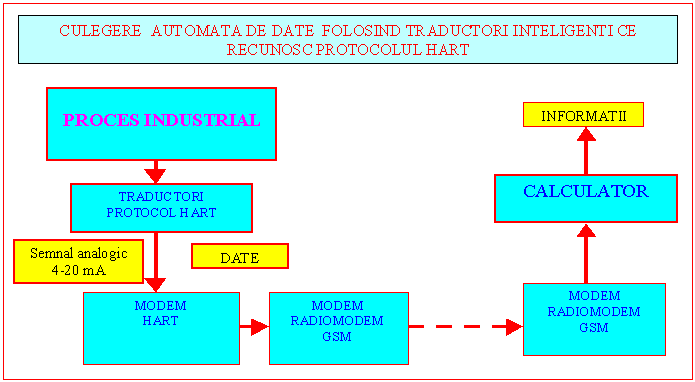
Protocolul HART cel mai utilizat protocol de comunicatie cu senzori inteligenti utlizati in automatizare, monitorizarea proceselor industriale si in instrumentatie. Protocolul HART continua sa creasca in popoularitate fiind recunoscut in industrie ca un standard global pentru instrumentatie inteligenta. Protocoul este usor de utilizat dand posibilitatea comunicarii bidirectionale in mod digital simultan cu semnalul analogic 4-20 mA utilizat de echipamentele si senzorii traditionali.
Solutia de comunicare oferita de protocolul HART este importanta pentru ca pastreaza cablarea existenta intr-un anumit sistem clasic. Inlocuind traductorii si instrumentatia clasica cu traductori si instrumentatie inteligenta capabila sa comunice prin semnal digital obtinem un sistem performant capabil sa comunice cu calculatoare aflate la distanta permitind reconfigurare, diagnosticare, citire date, etc.
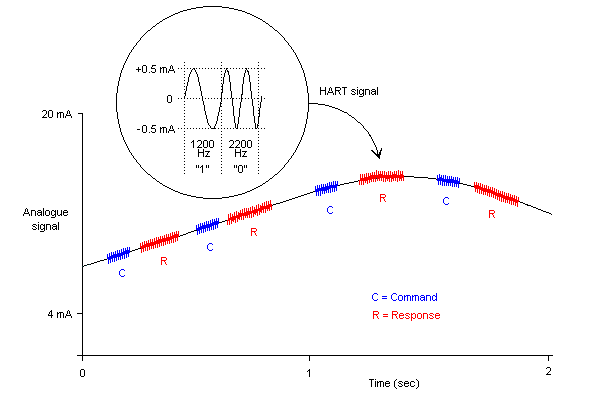
HART("Highway Addressable Remote Transducer") este un protocol pentru comunicatie digitala proiectat pentru aplicatii industriale de masurare, monitorizare si automatizare.
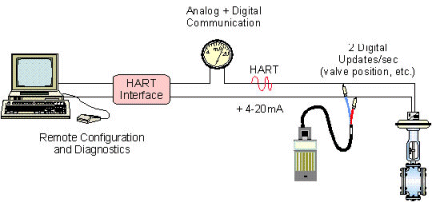
Se bazeaza pe adaugarea unui semnal digital modulat peste semnalul analogic de 4-20 mA numit semnal unificat. Semnalul digital este modulat in frecventa astfel 0 Logic cu o frecventa de 1200 Hz iar 1 Logic cu o frecventa de 2200 Hz.
Intrucit semnalul modulat HART are valoare mica si are forma de unda sinusoidala, valoarea lui medie este 0 si nu afecteaza semnificativ valoarea semnalului unificat, acesta putind fi utilizat in continuare. Protocolul HART permite deci extinderea functiilor sistemelor actuale permitind comunicare simultana in semnal unificat si in semnal digital.
Campul PREAMBULUL, inte 5 si 20 bytes cu valoarea “FF” are rolul de a ajuta receprorul sa se sincronizeze pe sirul de caractere receptionat.
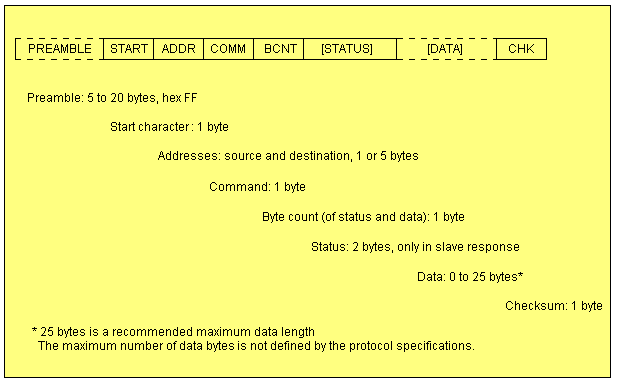
Caracterul de START poate avea diferite valori indicind tipul de mesaj: master to slave, slave to master, sau burst mesaj burst de la slave, precum si formatul adresei:scurt sau lung.
Campul ADRESA include adresa master-ului si adresa slave-ului. In format scurt adresa slave-ului este pe 4 biti, iar in format lung de 38 biti.
Caracterele de COMANDA contin comenzi HART de tip :
-Universal 0-30
-Practice 32-126
-Specifice perifericelor 128-253
Caracterul NR-CUVINTE-contine numarul de cuvinte al mesajului. Receptorul utilizeaza aceasta valoare pentru a sti daca mesajul este gata. (Nu exista un caracter special pentru “Sfirsit mesaj”).
Campul STARE este format din doua caractere, fiind prezent doar in raspunsul slave-ului. Campul contine informatii despre erorile survenite in transmisia mesajului, starea comenzii primite, starea unitatii respective.
Campul DATA poate sau nu sa fie prezent in functie de comanda. Se recomanda o lungime maxima de 25 de caractere pentru a pastra o durata rezonabila a timpului de transmisie a unui mesaj.
Cuvantul SUMA DE CONTROL contine valoarea expresiei : sau exclusiv intre toti octetii transmisi anterior. Din aceasta valoare impreuna cu bitul de paritate atasat se poate determina daca a avut loc o eroare de comunicatie.
Daca se utilizeaza numai comunicatia digitala mai multe dispozitive inteligente se pot cupla pe aceeasi linie in paralel in sistem “multidrop”. In acest caz semnalul analogic este setal la valoarea minima pentru toate dispozitivele(4mA).
HART a fost dezvoltat de firma Rosemount in anul -1980,dar a fost facut public si este complet deschis, toate drepturile apartin organizatiei independenteHART Communication Foundation (HCF) care intretine protocolul si eventualele dezvoltari ulterioare.
Exista astazi peste 100 membrii HCF majoritatea avand produse care respecta protocolul de comunicatie HART si care acopera o gama larga de masuratori.
Pentru a putea conecta dispozitivele inteligente (ce comunica prin protocol HART ) cu sisteme de calcul se utilizeaza HART Modemuri care extrag informatia digitala din semnalul modulat proventit de la dispozitivele inteligente respectiv moduleaza informatia digitala transmisa de calculator spre dispozitivele inteligente.
Exista modemuri single chip CMOS care se incadreaza in standardul BELL202, modemuri special proiectate pentru semnal HART
HT2012 HART este un astfel de modem, fiind proiectat pentru a interfata dispozitive inteligente de tip HART avand rolul de modulare si demodulare semnal.
Viteza de transfer a datelor este de 1200 bauds.
Cele mai importante semnale furnizate de modem sunt reprezentate in figura de mai jos. Prin intermediul acestor semnale se poate face conexiunea directa la portul serial al unui calculator.
|
|
|
|
| Termen | Descriere | |
| SCADA | Supervisory Control And Data Aquisition | |
| CAN | Convertor analog numeric | |
| DCS | Distributed Control System | |
| UC | Unitatea de comanda | |
| ROM | Read Only Memory | |
| RAM | Random Access Memory | |
| PWM | Pulse Width Modulation | |
| In Circuit Programming | Programare controller-ului direc in circuit fara a fi nevoie de scoaterea acestuia din circuit | |
| HART | "Highway Addressable Remote Transducer" | |
|
|
|
|
|
|